

My first solution was to simply mount the motor from the other side, and screw it on the inside of the bracket. This works up to a point, but then prevents the wrist movement (up-down, not rotate) from realizing its full range. This is particularly bothersome because it means you can’t have the grip horizontal when the arm is in a position which takes the grip close to the supporting surface.
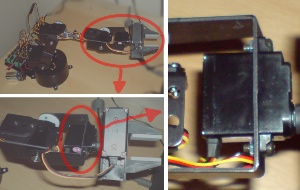
In the end I got around the problem by carefully removing the back of the servo motor, and pulling the grommit away from the body. The dis-assembly can then be manipulated through the hole in the bracket, and carefully re-assembled once inside. The motor can then be screwed to the front of the bracket as per the instructions, and clearance is (just) enough for the wrist to see a full range (180 degrees) of movement.