

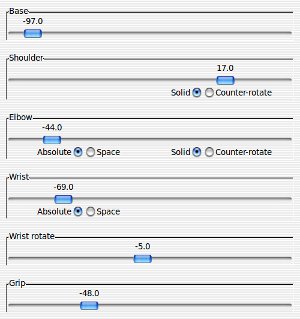
The Level 3 GUI looks just like the Level 2 one, with the expected addition of buttons on some select sliders to activate the spatial orientation and counter movement facilities which the Level 3 API brings us.
You will realize when you start using this GUI that the robot does not seem to be getting any smoother in its movements, especially in the case where you move the shoulder joint with counter-rotation on the elbow. The fact is that this style of interface does not suit the mechanism. Firstly, it is unrealistic to expect a physical mechanism to react to and follow a purely graphical widget. Also there is the sampling problem. How does the robot decide when to move? It could happen very quickly, but then it will not move very far, and will be very jerky. At the other extreme it might move after a period of time, in which case the movement itself might be more subdued, it being an average over user commands over an extended period of time, but it will also feel rather unresponsive as changes in the motion occur at granular time frames.
However, you will find that when you use the REPL and drive the robot directly be the level 3 API proecuedure calls, then the movements are smooth, because the exact nature of the move required is known the instant the command is executed. We will leverage this facility at the next (higher?) level.